

ロボットの定義
国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の「NEDOロボット白書2014」(2014年3月)では、 ロボットは「センサー、知能・制御系、駆動系の3つの要素技術を有する、知能化した機械システム」と定義。
ロボットの分類
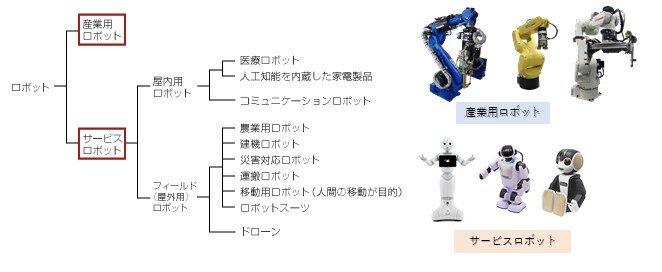
産業用ロボットの分類
ロボットの先端には、物を掴むためのハンドや、作業に使う道具などが装着できます。3次元空間内では空間上の任意の位置に運ぶため、3つ以上の関節が必要になります。各関節をどのように配置するかによって産業用ロボットの種類が分類されます。
軸の構成が(直動‐直動‐直動)の直角座標ロボット 軸の構成が(回転‐直動‐直動)の円筒座標ロボット 軸の構成が(回転‐回転‐直動)の極座標ロボット 軸の構成が(回転‐回転‐回転)の多関節ロボット
「産業ロボット」は、それぞれ得意な作業が異なります。 作業内容に適した種類のロボットを選定する必要があります。
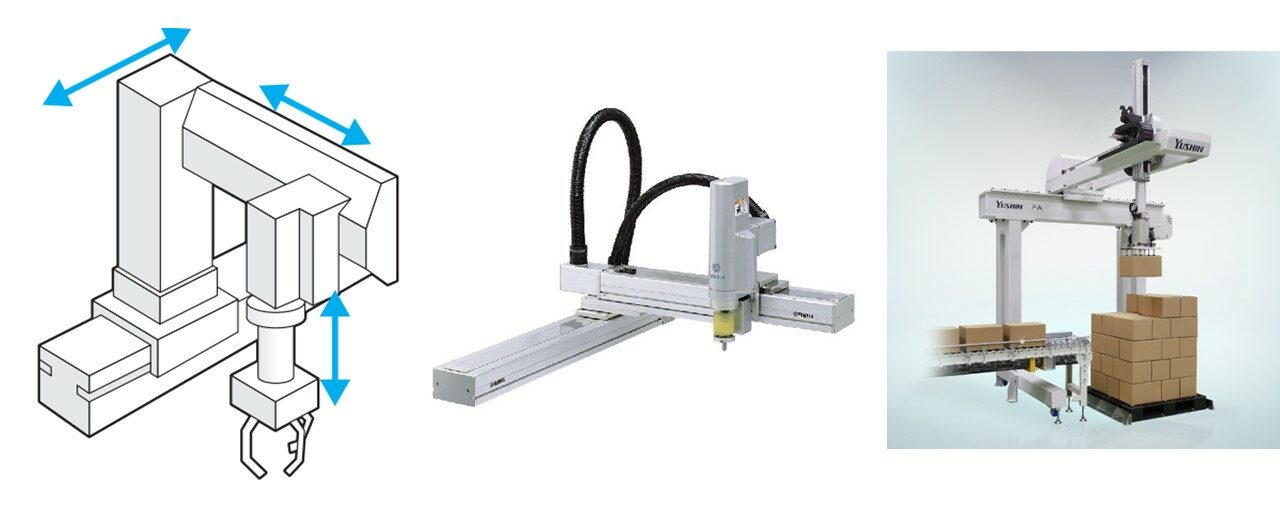
位置決め時、3つの関節に直動関節を用いる形式で、このタイプは位置決めの3軸を動かしても先端の姿勢が変わりません。スライドする軸を組み合わせたシンプルな構造で複雑な動作はできませんが、精度が高く扱いやすいロボットです。けれども作業領域のわりに設置面積が大きくなるのが欠点です。複数のロボットと組み合わせて使われることが多く工場では製品搬送などに使われる事が多いです。
直角座標ロボットには2つのタイプがあり床に直置きするタイプのスタンド形とアームが上から吊り下げられるタイプのガントリ形があります。
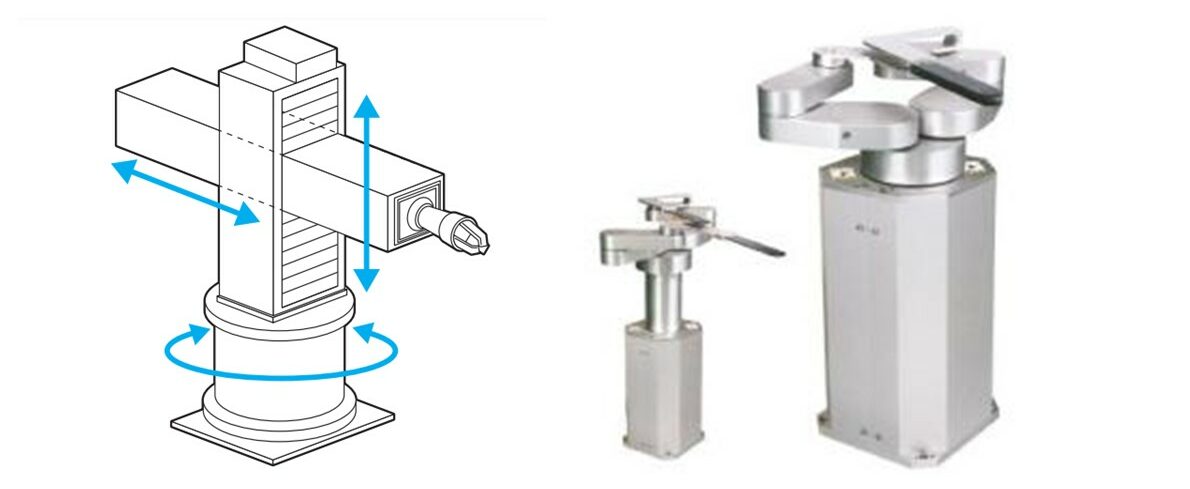
ベースに一番近い関節に回転関節を持ち、それに続いて2つの直動関節を持つ形式です。直角座標ロボットより広い作業領域がとれるようになります。
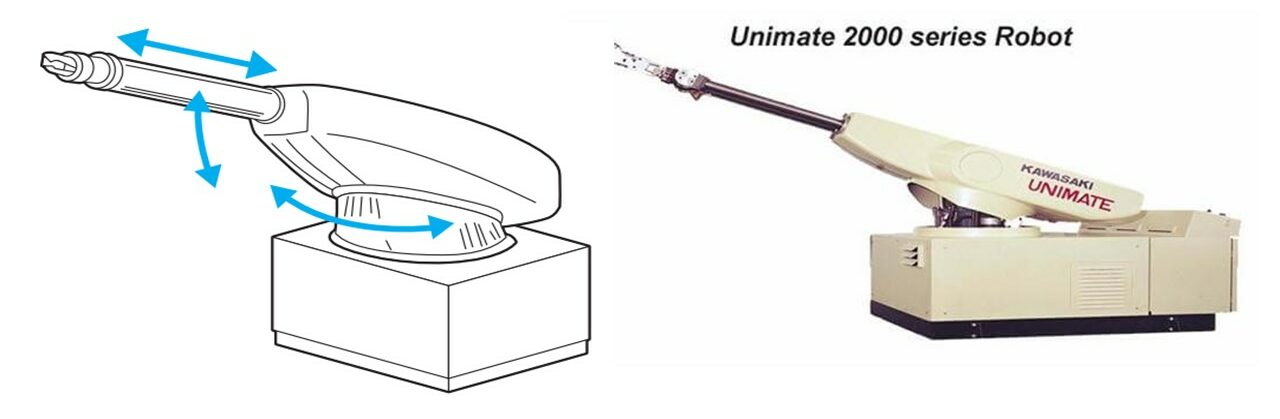
ベースから、回転・回転・直動 と関節を配置した形式で、直角座標や円筒座標より、更に広い作業領域が確保できるが、アーム先端の姿勢が変化するので制御が複雑になります。このタイプは、産業用ロボットが普及され始めた初期に活躍しましたが、現在ではほとんど使われなくなりました。
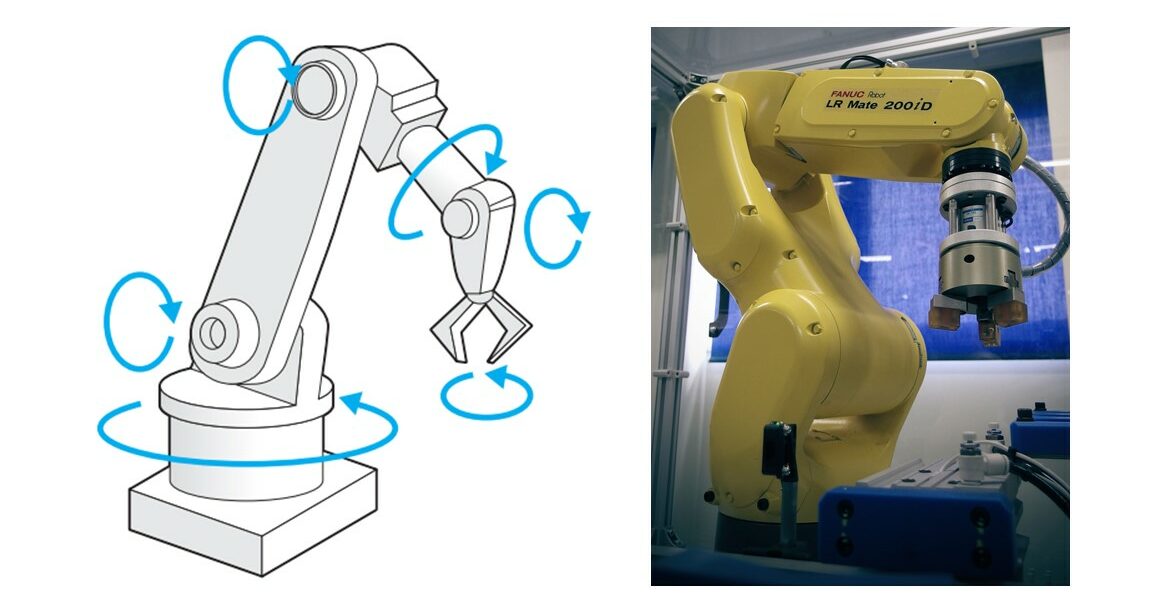
全ての関節を回転で構成した産業用ロボットの形式です。現在もっとも活用されている産業用ロボットで 人間の腕に近い構造を持っているので関節を肩関節・肘関節と呼んだり、関節間の部分を上腕・前腕と呼んだりすることもあります。4つの形式の中で設置面積のわりに一番大きな作業領域がとれます。 汎用性が非常に高く、搬送から溶接や塗装、組立まで幅広 い工程に導入されています。
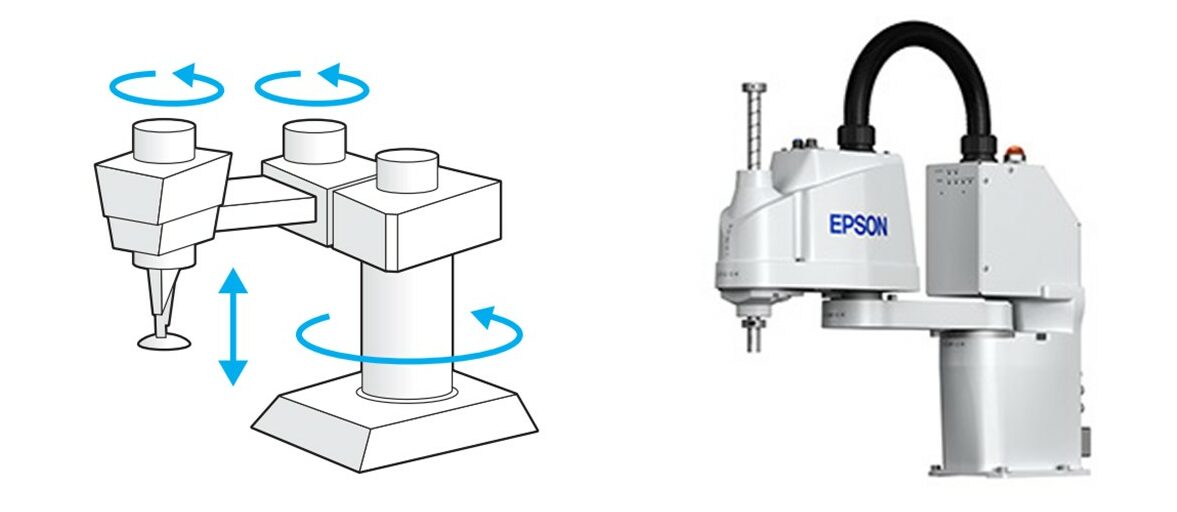
水平の動きに特化したロボットです。水平多関節ロボットとも呼ばれ、3つの回転動作と1つの上下動作が基本になるロボットです。 電機分野における組立工程(部品の押し込み作業など)に 幅広く採用されています。
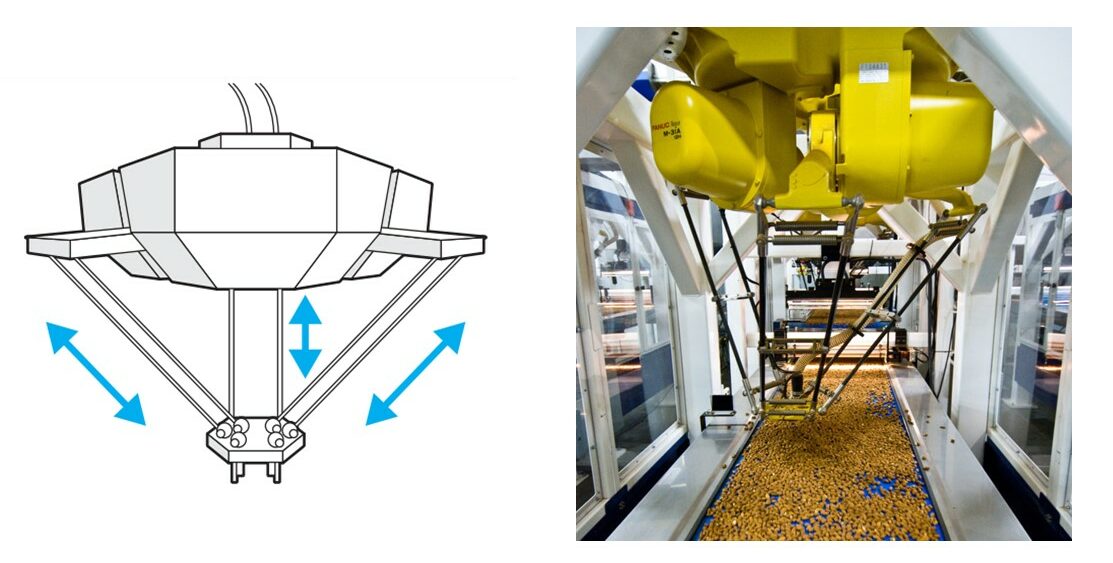
パラレルメカニズム(並列なリンクを介して1点の動きを制御す る方法)を使った産業用ロボット。ゲンコツロボットとも言います。先端にはワークを吸いつけて搬送する搬送するための吸着ユニットなどが取り付けられます。可搬重量は少ないですが、高速動作が得意。 ベルトコンベアーの上などに取り付けられ、流れてくる製品を高 速でピック&プレースに活用されています。

ロボットの胴体があり、そこに文字通り腕(アーム)が二本伸びています。それぞれの腕に役割を持たせ、自動動作を実施します。双腕ロボットの利点は「両手で箱を持つ」など、2つのアームを利用してより複雑な作業を実施することが可能な点です。
関連記事:【用途別に紹介】産業用ロボットにできること
協働ロボットとは文字通り、人と協力して働けるロボットのことを指します。産業用ロボットは規定により人と隔離して使用をすることが義務付けられていますが、協働ロボットは低出力な上、人のそばで作業を行っていても人に危険を及ぼさない機能が追加されているため人と同じ空間内で協力して作業が行えます。
MIRAI-LABでは協働ロボットを使用した設備案件の構想や、協働ロボットDOBOTの販売を行っており。新しいロボット自動化の可能性を模索しています。
※DOBOTについてはこちらから↓

産業用ロボットの構造は人間と同じ
産業用ロボットはロボットアームで構成され、ジョイントとリンクの組み合わせが基本的な構造になります。人間の体で言えば、肘や肩など自由に曲がる関節部分がジョイント、その間を繋ぐ骨の部分がリンクに相当します。
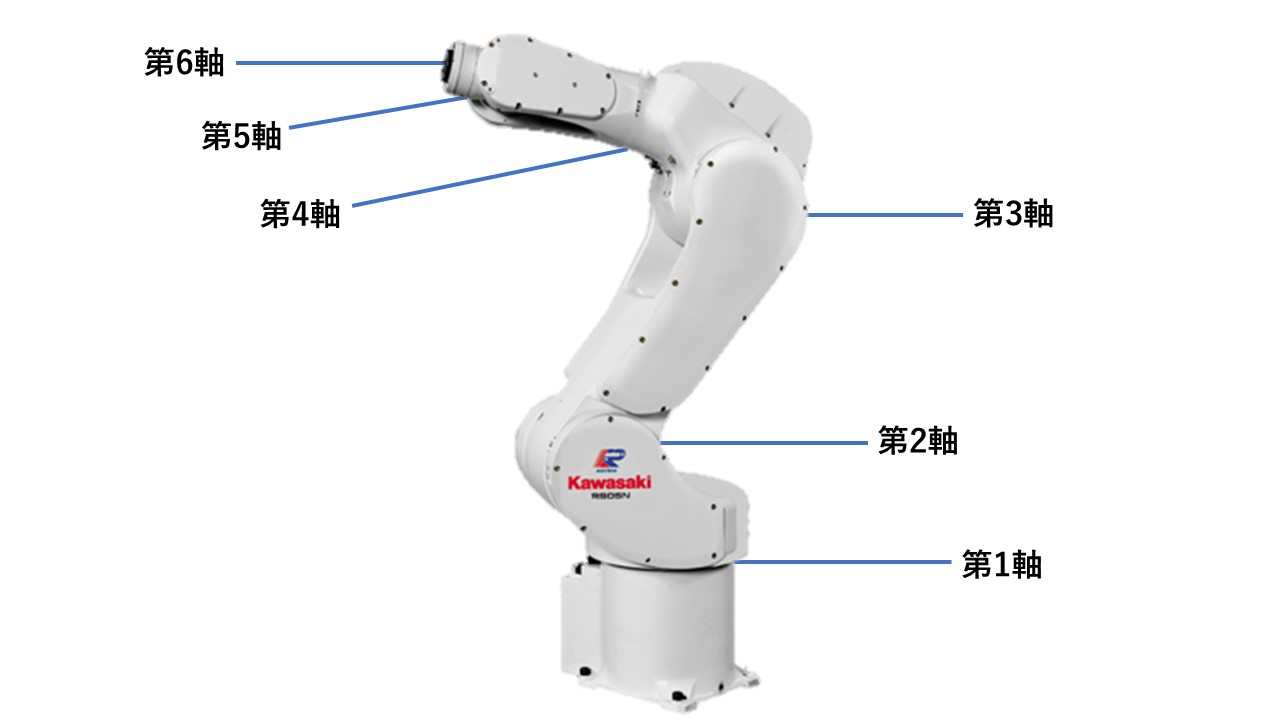
産業用ロボットは何軸で構成されているの︖
例えば、複雑な動きが可能な垂直多関節ロボットの場合、一般的に6つの関節(6軸、自由度6)で構成されています。人間の場合に置き換えると、以下のようになります。
ロボットを動かすにはどのような要素が必要︖
ロボットを構成する要素は大きく分けて3 つあります。
1. メカ(構造、機構、駆動部品、センサー保持部など) 2. 電子回路( 駆動回路、センサー回路、マイコン、コンピュータ回路) 3. ソフトウェア( 制御、情報処理、判断等)
メカ要素について詳しくします。産業用ロボットのメカ要素で特に重要なのは、アクチュエータ(関節)、減速機、センサー、非常用ブレーキ、伝達機構の5つになります。
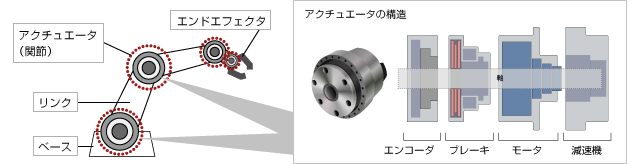
アクチュエータ
関連記事:適切な駆動装置(アクチュエーター)の選定について
減速機

・サイクロイド減速機
・波動歯車装置
・遊星歯車装置
センサー
・エンコーダ
・圧力センサー
・加速度センサー
・トルクセンサー
(歪ゲージ/静電容量/光学)
非常用ブレーキ
・無励磁作動形ブレーキ
伝達機構
・ベルト/タイミングベルト
・ギアー(歯車)
・カップリング(ノーバックラッシ)
・ETPブッシュ(ハイドロ方式)
関連記事:“把持したり、吸着したり”ロボットハンド/エンドエフェクタとは?

ロボットスクールを毎月開講しております。
参加ご希望の方はお問合せフォームよりお気にお問合せください。
