力覚センサは、複数方向の力やモーメントを同時にリアルタイムに検出することができるセンサのことです。
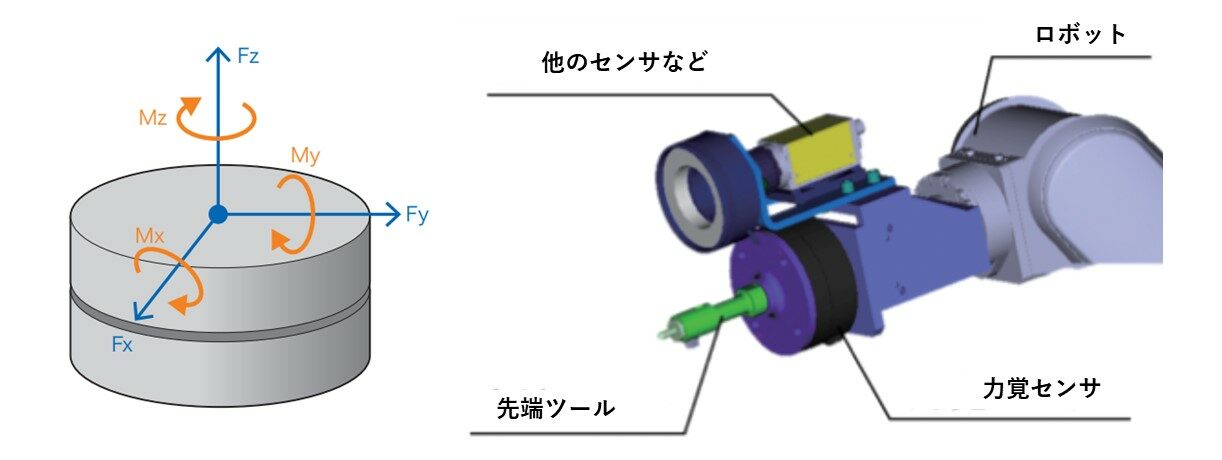
力覚センサは、ロボットシステムをインテグレートする際にロボットのエンドエフェクタに取り付け、外力や反力(力、モーメント)を検出するのに使用します。繊細なセンシングを実現するためには、ワークに接触するツールやハンドの直近にセンサを取り付ける必要があります。センシングに不要な機器はロボット側に取り付けます。
どんな時にどう使うか
熟練作業者の感覚に頼った作業や精密な作業といった、従来のティーチング作業やビジョンセンサなどの非接触センサで自動化が難しい作業に適しています。
何ができるか
力覚センサ情報を用いて、ロボットに人の手のような感覚を持たせることができます。今までのロボットでは難しかった微小な力加減を必要とする作業が実現できるようになります。
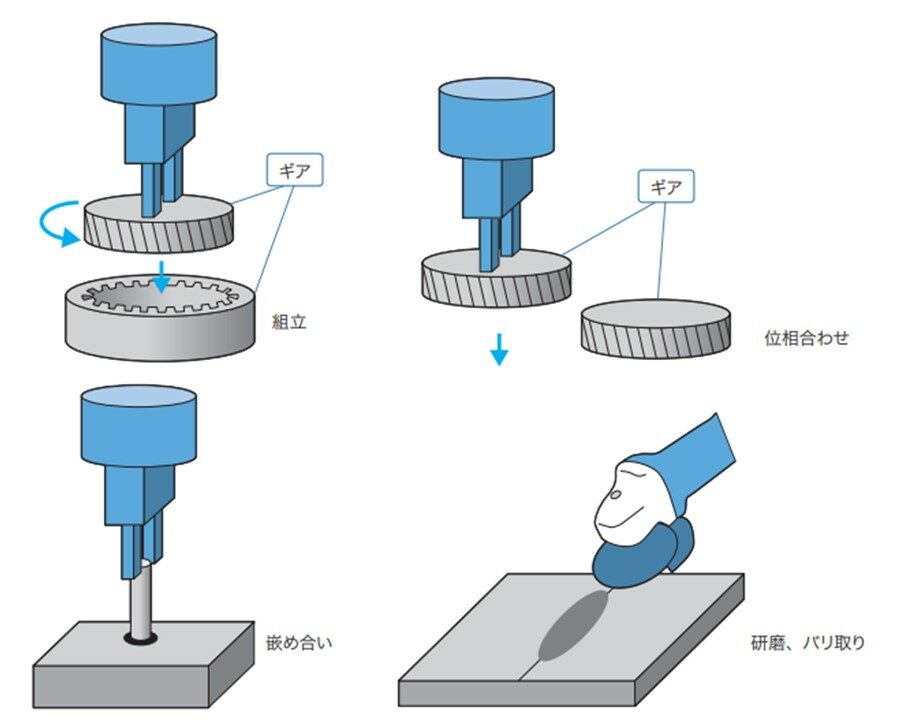
例えば、精密な嵌めあいやギアなどの位相合わせなどの部品組立作業、研磨作業やバリ取りなどの仕上げ作業、押し付け力管理、重量測定による品種判別作業など幅広く応用することができます。
用途例
1.産業用ロボットに搭載し、部材の研削やバリ取り作業
2.協働ロボットに搭載し、部品のピッキングや嵌め合わせ、ネジ締め作業
特徴
力覚センサの特徴として以下のようなものが挙げられます。
● 一般的にセンサ内部にアンプや演算用のマイコンが内蔵されており、小型で軽量な構造になっています。
● 力成分3軸方向(Fx、Fy、Fz)とモーメント成分3軸方向(Mx、My、Mz)を同時に検出でき、静的・動的両方の測定ができます。
● 応答性の高いものが求められており、一瞬の変動を検出することが可能。
● 出力形式には、USBやRS422、Eternet、Analogなど様々な形態があります。
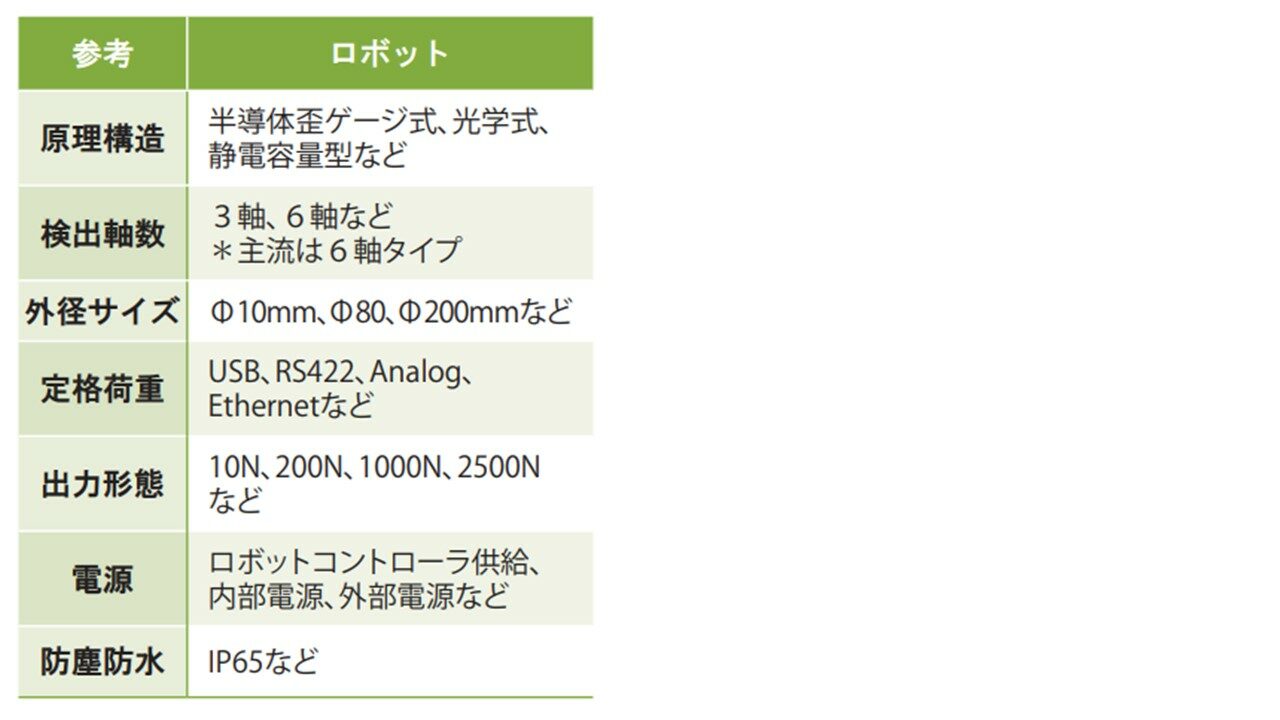
種類
メーカによって力を検出する原理構造や外形サイズ、定格荷重などが異なり、様々なタイプが存在します。
選定
ロボットによる力覚制御機能はロボットのオプション機能として準備されており、ロボットメーカによって使用可能な力覚センサのラインアップが用意されていることが一般的です(一部、使用するセンサは問わないロボットメーカも存在する)。
力覚センサ選定にあたっては、採用を検討している作業に “どの程度の負荷がかかるか”や “どの程度の繊細さが必要か”をまず想定し、センサの定格荷重や計測分解能といった仕様と照らし合わせて選定する必要があります。
特にモーメント成分の定格荷重は、力成分の定格荷重に比して小さいことを考慮する必要があります。
モニタリング
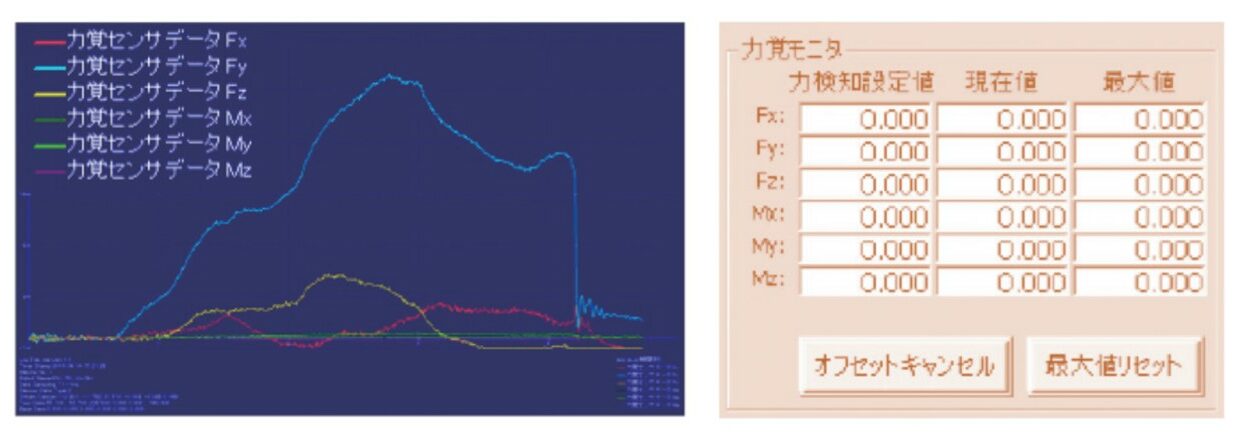
一般的にロボットメーカの力覚制御オプション機能の一部に力覚センサのデータをモ ニタリングできる機 能 があり、ティーチペンダントやロボットコントローラへ接続したPCの専用ソフトから見ることができます。
取得できるデータには力覚センサの生データや座標変換後のデータ、位置指令などがあり、数msの周期でサンプリングされます。
取得したデータは、リアルタイムにデータを見ることもできたり、ログデータとしてCSVファイルに出力することも可能です。この機能を有効に利用することで、対象作業への力のかかり具合を分析することができ、力覚制御パラメータ調整や作業状態の確認をすることができます。
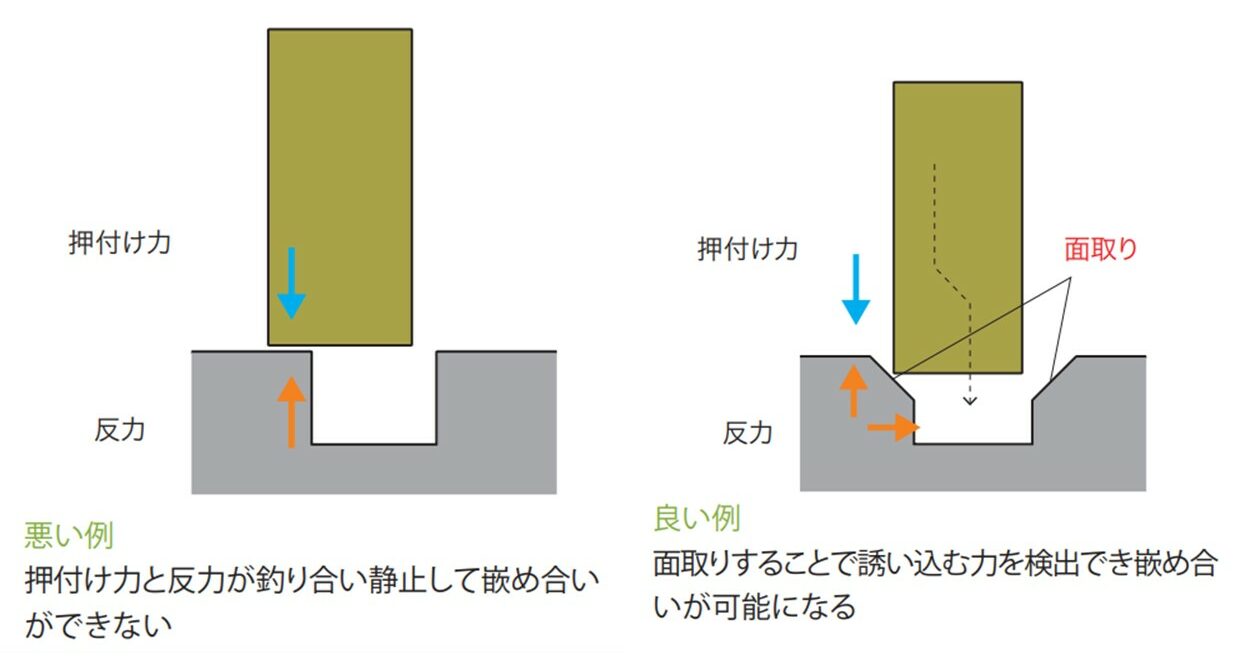
ツールやワーク側の工夫
力覚センサを使用しても、難しかった作業が簡単に自動化できるわけではありません。力覚制御はあくまで力覚センサで検出した力成分を基に制御を行うため、センサで上手く力を検出しやすいようにワークやツール・ハンド側の形状に工夫を施すことも必要となってきます。対象作業にどのような力がかかり、どのように動作させたいのかを、人の作業を分析しながら把握し、設備設計やプログラムに落とし込んでいくことが重要な役割となります。
注意点
①パラメータ調整
力覚制御のパラメータは、接触するワークの材質・サイズ・重量により大きく変わってきます。
特に、力覚センサの応答性感度に当たるパラメータは設定値が高いほど力覚制御の応答性が高くなり、上げすぎると接触時に過敏に反応してしまい動作が不安定になります(危険な場合があるので注意)。作業の最初は応答性感度を低く設定し、現象を確認しながらパラメータを調整していく必要があります。
②噛み付き現象
精密な嵌め合い作業を行う場合、ワークの挿入時に摩擦などの要因によりワーク同士が噛み合って動かなくなる噛み付き現象が発生することがあります。この場合、力覚センサ上は指令値と反力が釣り合った状態となり、作業途中に静止してしまうこととなります。
③作業時間は長くなる
力覚制御を使用し、人作業を自動化して置き換える場合、微小な力をセンシングしながらロボットを制御するため作業時間は基本的に長くなります。そのことを十分に考慮した工程やシステムを検討しなければなりません。

