

SIerは、顧客から依頼されたロボットシステムを構築し、提供します。その際、ロボットシステムは人と協働して作業をおこなうことも考慮して、人に対して危害を加えることがないように設計・開発する必要があります。つまり、SIerは構築するロボットシステムに対して、十分な安全対策を施さなければなりません。
国内法においても安全に対する規制が存在します。産業用ロボットシステムに関わる法規制としては、「労働安全衛生法」や「労働安全衛生規則」が代表的なものとして存在します。
労働安全衛生法における機械関係の規制の原則としては、産業用ロボットについては、周囲に物理的な柵などを設けることを基本としていました。しかし、コンピュータ制御技術の向上により、信頼性の高い制御が可能となり、新たな制御機能を付加することによる安全方策である「機能安全」の国際規格が制定されたことから、現在では“適切な安全関連システムを有しているロボットシステム”については、柵などを設けることなく労働者と協働で作業を行うことを認めています。

また、労働安全衛生規則において、危険業務として産業用ロボットの操作業務(第36条 第32号)、教示等における安全要件(第150条の3)、運転中の危険の防止要件(第150条の4)、検査等の安全要件(第150条の5)、点検の実施(第151条)などが規定されています。
関連記事:【毎月開催】MIRAI-LAB ロボットスクール(安全教育)のご案内

人の作業を支援し、作業の効率化を図るため製造現場では「産業用ロボット」が普及し、現在は人と協働で作業をする協働ロボットの導入が進んでいます。また、ロボットの活躍の場は今や製造現場から介護現場や、直接個人の生活の質を向上させる目的で「生活支援ロボット」として活躍を始めています。産業用ロボットや生活支援ロボットを含むロボットシステムを構築する場合は、十分に安全の確保に努めることが絶対の条件です。
関連記事:3密回避で需要、コロナ禍で導入が進む【協働ロボット】とは
ロボットシステムに存在するリスクは、システムの用途、性質、装置の複雑さ及び人間とロボットとの相互作用のあり方によって、ロボットシステム固有に存在します。そのため、ロボットシステムを提供するSIerは、ロボットシステムを構成するロボットや各構成要素が、ロボットシステムのライフサイクルを通じて、安全に使用できるための対策を講じなければなりません。ここでは、ロボットシステムに対する安全確保の方法としてのリスクアセスメント手法、並びにリスクアセスメントの結果に基づいて実施するリスク低減策について紹介します。
ロボットなどの機械類を開発するための安全指針としては、ISO/IEC Guide 51(JIS Z 8051 )“Safety aspects-Guidelines for their inclusion in standards ”(安全側面-規格への導入指針)が存在します。
この規格は、機械的要素を持つ製品又はシステムに存在するリスクを減らすことを目的に制定された指針であり、この指針の下に、リスクアセスメント活動を規定したISO 12100(JIS B 9700)“Safety of machinery-General principles for design-Risk assessment and riskreduction”(機械類の安全性-設計のための一般原則-リスクアセスメント及びリスク低減)が位置づけられています。
産業用ロボットの安全規格ISO 10218-1(JIS B8433-1)「ロボット及びロボティックデバイス-産業用ロボットのための安全要求事項-第1部:ロボット」及びISO 10218-2(JIS B 8433-2)「ロボット及びロボティックデバイス-産業用ロボットのための安全要求事項-第2部:ロボットシステム及びインテグレーション」、並びにISO 13482(JIS B 8445)「ロボット及びロボティックデバイス-生活支援ロボットの安全要求事項」で は、それぞ れ ISO 12100(JIS B9700)に基づいてリスクアセスメントを行うことを求めています。
SIerは構築するロボットシステムに対してリスクアセスメントを実施し、リスクを許容できるまで低減しなければなりません。また、ロボットシステムを構成するロボットを、ロボットシステムに要求される仕様に基づき選定しなければなりません。
関連記事:【産業用ロボットと安全】リスクアセスメントについて
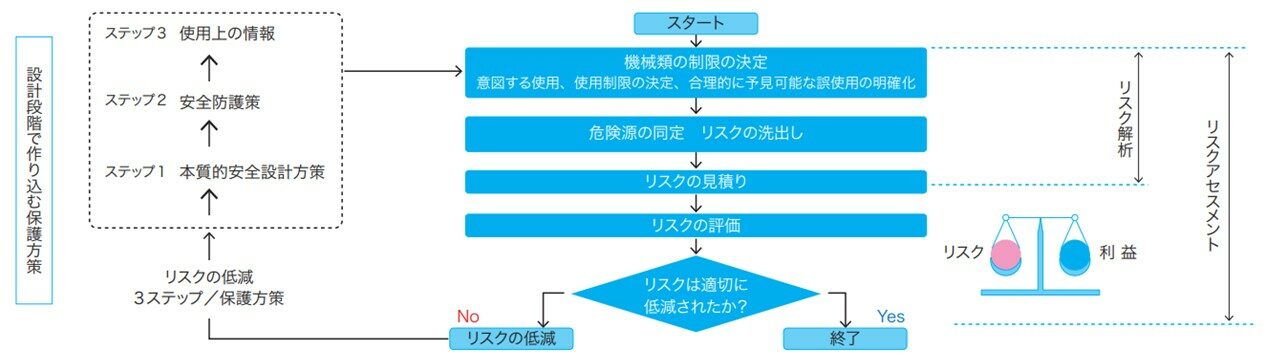
ロボットシステムを対象としたリスクアセスメント活動とは、
①システムを構成するロボットや他の構成要素、それらの関係を明確にする。②対象とするロボットシステムを使用する人、周辺の環境を含めた使用場所、使用方法、並びに予想することができる誤使用(合理的に予見できる誤使用)を明確にし、③ロボットシステムのライフサイクル中にロボットシステムの使用者や周囲の人に対して発生が想定される危害、財産への損害、または環境への悪影響をリスクとして洗い出し、④その原因(危険源)を識別して洗い出したリスクごとにその大きさを見積り、その大きさが受け入れ可能なレベルにあるのか否かを評価するまでの一連の活動をいいます。
リスクが受け入れ可能なレベルにない場合には、可能になるまでリスク低減策の検討を繰り返します。
どのようなロボットシステムを構築するかをコンセプトとして明確にしなければなりません。コンセプトをまとめるにあたり、5W1Hに沿って、「何ために(why)」「どのような(What)」ロボットシステムを作り、「いつ(When)」「どこで(Where)」「誰 が(Who)」「どのように(How)」ロボットシステムを使うかを考えることも一つの方法です。
コンセプトを明確にすることは、ロボットシステムのユースケースを特定し、制約・制限を明確化する作業であり、上の図における機械類の制限の決定に該当します。
特に、「どのようなロボットを選定するか」についてはSIerは構築するロボットシステムに対する要求を分析して選定する必要があり、顧客の要求を満足するロボットシステムの構築のためには十分な分析に基づいて選定する必要があります。
また、「どのようにロボットを使用するのか」を明確にする場合には、正しいロボットの使い方のみならず、合理的に予見できる誤使用についても明確にする必要があります。また、動力源についても明確にしておくことは大切な情報となります。開発者側から「どのように使用してほしい」といった使用方法を定義しても良いです。SIerは顧客と構築するロボットシステムについてしっかりと合意しておかなければなりません。
SIerは、対象とするロボットシステムに存在するリスクとその原因を実際の運用状況を想定しながら洗い出すことが大切です。
リスクとその原因を網羅的に洗い出すために、関係者(ロボットメーカ、SIer、顧客)によるブレーンストーミングは効果的な方法です。ロボットシステムのライフサイクルの各フェーズにおける使用状況を考え、リスクを列挙するとともに、機械、電気、熱、電磁的ノイズ、使用材料及び物質、人間工学原則、使用環境など、その他、人や物体に影響を及ぼすエネルギーなどの危険源に注目する手法も効果的です。また、「使用者が怪我を負う」などを頂上事象に置いて、その原因を網羅的に洗い出すFTA(故障の木解析)やロボットシステムと人との相互作用についてシステマティックに分析するSTAMPなどの手法も効果的です。
ISO 12100(JIS B 9700)、ISO 10218-1(JIS B 8433-1)、ISO 13482(JIS B 8445)の付属書には、危険源が例示されているので参照することが望ましいです。
リスクの見積りとは、「危害のひどさ」と「発生頻度」をそれぞれ定量的に表し、リスクの大きさを「見える化」することです。
例えば、(リスク)=(危害のひどさ)×(発生頻度)の式を使って目安としてのリスクの大きさを定量的にあてはめるなどの方法があります。リスク見積りの方法としては、5×5マトリクス法や積算法(ハイブリッド法)などが提案されています。

リスクの評価とは、リスクが受け入れられるレベルにまで低くなっているか否かを評価することであり、受け入れられるレベルにまで至っていない場合には、「リスク低減策を実施する必要がある」と判断することです。このため、SIerは、リスク評価に先立ち、リスク低減策の必要性を判断する「リスク評価表」を準備しておくことが必要です。
リスクの見積り結果をリスク評価表にあてはめてリスクを評価し、低減策の必要性を判断します。リスク点数は、発生頻度が低いと推定してリスク点数が低くなった場合でも、万が一そのリスクが顕在化した場合に重大な危害に至る可能性があると判断した場合は、低減策を検討することもあり得ます。
リスクアセスメントの結果、リスクレベルが受け入れ可能なレベルにまで十分低くなっていない場合には、リスク低減策を講じる必要があります。リスク低減策には、「本質的安全設計方策(ステップ1)」、「安全防護策(ステップ2)」、「使用上の周知(ステップ3)」の優先順位があります。これを「3ステップ法」と呼びます。

