こんにちは。株式会社MIRAI-LABです。
今回の記事では弊社で販売している協働ロボットDOBOTからAMRパッケージについてご紹介したいと思います。
AMRとは自動走行ロボット(Autonomous Mobile Robot)の略称です。自動ガイドロボットは、センサーやカメラを使用して周囲の状況を感知し、自分自身の位置を把握することで人間の操作なしに自律的に移動し、様々な作業を行うことができます。
AMRは工場内で部品や製品を載せて運ぶなどの使い方がありますがロボットアームを載せることで様々な作業を場所を変えながら行えるようになります。DOBOTではAMRと6軸の協働ロボットアームCRシリーズを組み合わせることで協働ロボットが活躍する場を広げています。
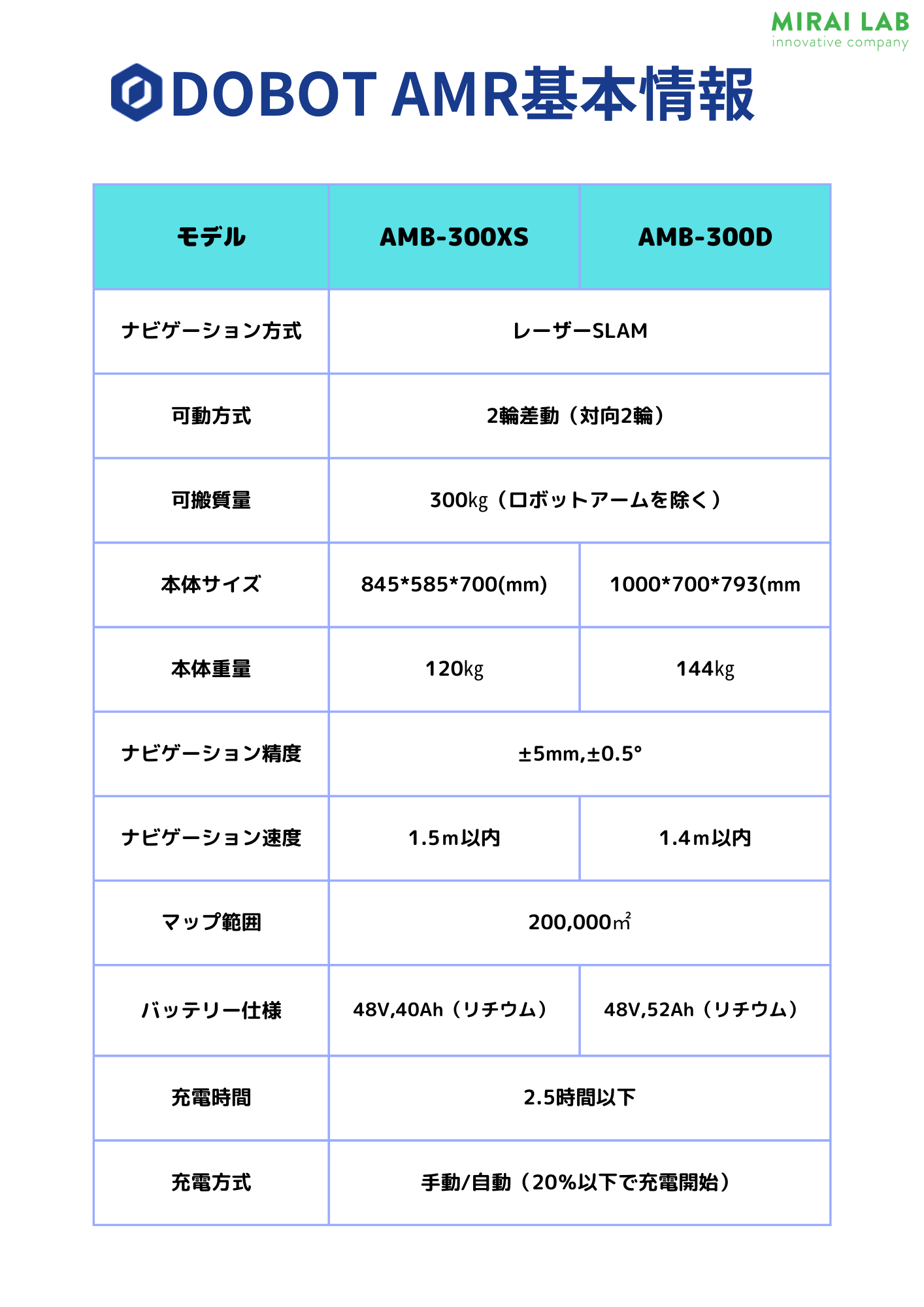
それではDOBOT AMRの基本情報について説明していきたいと思います。まずAMRの機種はAMB300XSとAMB300Dの2機種がありXSはクリーンルーム対応タイプでISOクラス5に対応しています。
まずナビゲーション方式についてはレーザーSLAM(Simultaneous Localization and Mapping)方式を使用しています。ロボットはレーザーセンサーを使用して環境の距離情報を計測し、これを基に自己位置推定と地図構築を行います。典型的なレーザーSLAMシステムでは、ロボットはレーザーセンサーを回転させながら周囲の物体や障害物までの距離を計測し、これを用いて周囲の地図を構築します。同時に、その地図上での自己位置を推定し続けることで、ロボットは移動中でも自身の位置を把握できるようになります。
ロボットがマッピングできる範囲は200,000㎡なので約東京ドーム10個分の広さを認識することが可能です。
走行速度は1.5m/秒で角度≦5%(約2.8°)、段差≦5mmの環境であれば走行が可能です。
可搬質量は300㎏と書いてありますがこれはロボットの本体質量は含んでいません。従って例えばCR10を搭載した場合はCR10 とコントローラボックスの重量を差し引くとのこりに搭載できるものの重量は240㎏程度となります。
電源は搭載しているリチウムバッテリーから供給されており稼働時間は約8時間で、充電時間は約2.5時間です。充電方式は充電ステーションでコネクターを接続する手動モードの他、電力が20%以下になったらロボットが自らステーションへ移動する自動モードがあります。
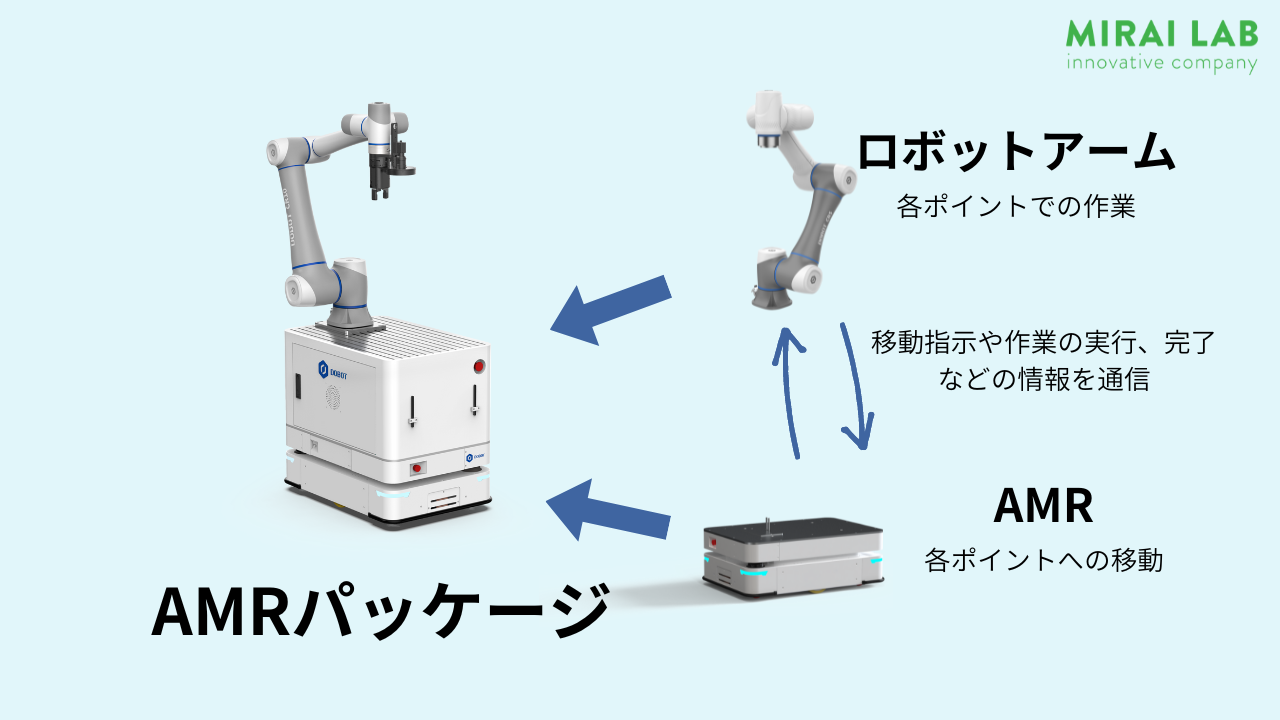
それではAMRを使ったロボットアームの活用について大まかな手順を紹介したいと思います。DOBOTのAMRパッケージはAMRに作業用ロボットアームが搭載されているのでロボットの作業を複数のポイントへ移動させて行わせることを想定しています。
まずAMRが動き回る空間の把握をする必要があります。AMRに搭載されているレーザーセンサを使用して移動空間がどんな形をしているのか、またどんな障害物が置いてあるのかを把握させます。そしてロボットが作業を行う重要なポイントを登録していきます。
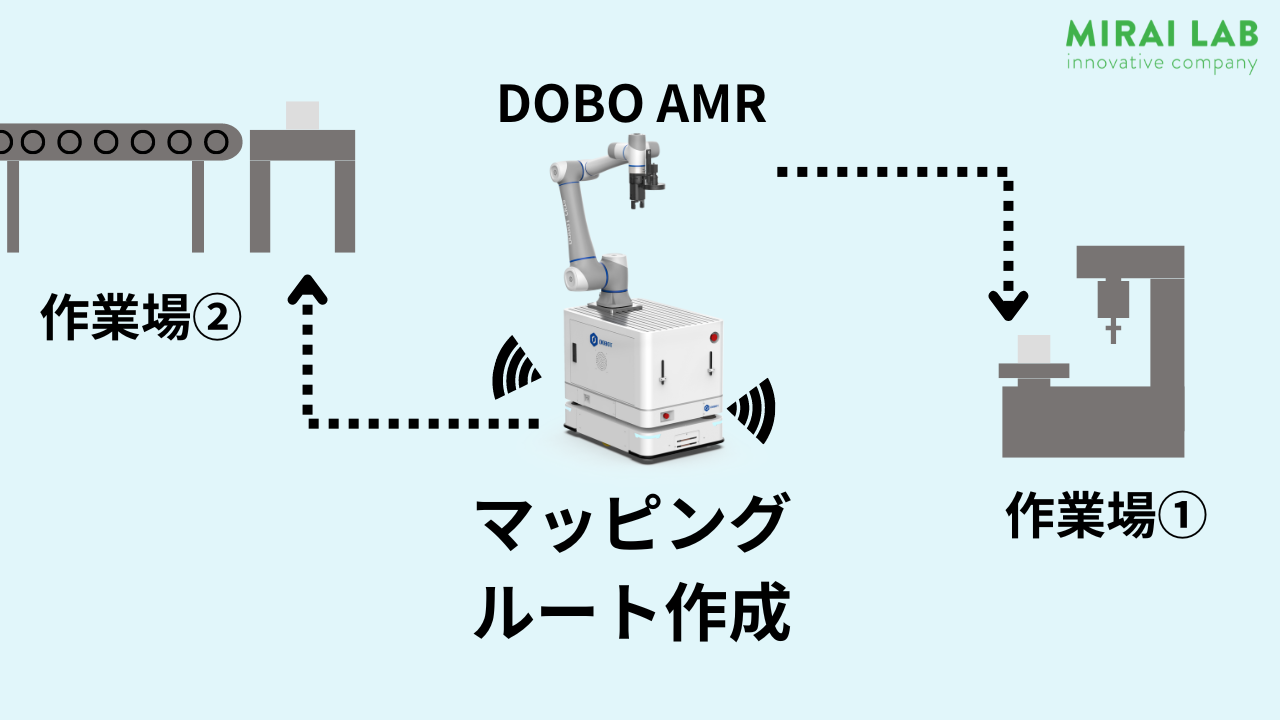
作業ポイントの登録が完了したらそのポイントへ移動するための経路を作成していきます。AMR用のソフトを使用して、どのようなルートを通ってポイントを移動するのかを指示することが可能です。
各ポイントでのロボットアームの動きをティーチングしていきます。AMRのナビゲーション精度は±5mmの為、微妙な位置ズレが生じます。このため通常はカメラを使用して作業ごとにティーチングプログラムを補正する必要があります。ロボットアームのメイン動作を作成するだけでなくカメラの設定等を行うことでロボットが位置決めされていなくても安定して作業を繰り返せるようになります。
プログラムの準備が完了したら最終的に、AMRとロボットアームがお互いの情報を通信してポイントへの移動と移動してからの作業をプログラム通りに遂行します。

AMRが移動中に人が近づいた場合はロボットは1時停止して、人に危害が及ばないようにします。人の検出距離は標準で1m以内に設定してあります。