
こんにちは。株式会社MIRAI-LABです。
今回の記事では協働ロボットに使用される周辺機器にどんなものがあるのか簡単にご紹介したいと思います。

一般的に協働ロボットは産業用ロボットと比較して簡単に立上げできることが特徴ですが、その使い方は周辺機器と組み合わせることで様々です。すなわち周辺機器の選択肢を把握しておくことでより使用者の要望に最適化した自動化が可能になります。
それでは弊社で営業をしているDOBOTを参考によく使われる周辺機器について見てみましょう。
※DOBOTの総合紹介ページはこちら↓
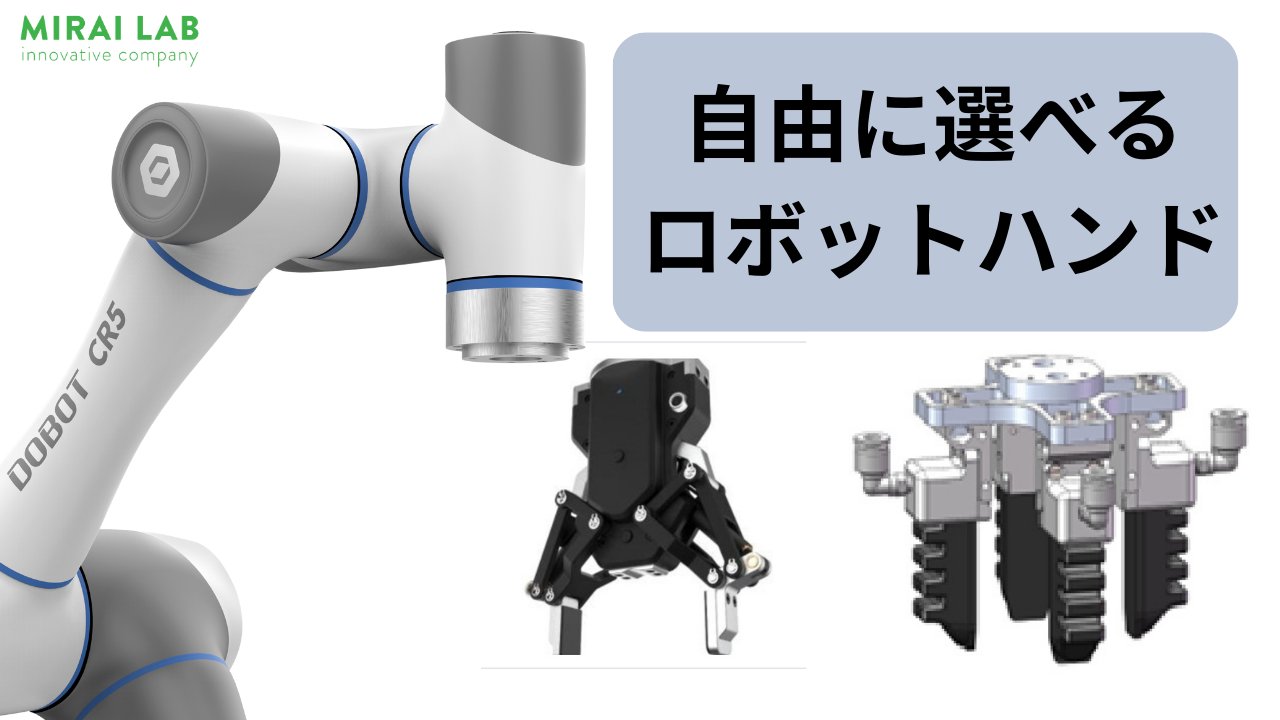
ロボットがものを掴んで運ぶための先端ツールは一般的にハンドと呼ばれます。駆動源が電機の電磁グリッパやエアー駆動のハンドが様々な会社から販売されています。掴むものの素材や形状によって駆動方式や爪(指)の数を最適化して使用します。どんなハンドを使うべきなのかは掴むものの形状や材質、質量を考慮して選定します。MIRAI-LABへ相談を頂ければ様々な商品から提案をすることが可能です。
弊社で取り扱いをしているDHロボティクスの電動グリッパ―に関する記事はこちらからどうぞ↓

↓食品を掴めるハンド「ソフマティックス」に関する記事はこちら


ハンドやその他の先端ツールを簡単に持ち替えするために装着する装置がツールチェンジャーです。持ち替えをすることで1台のロボットでできる作業の幅が広がります。

DOBOTはロボットから電源供給して使える小型ポンプボックスを用意していますのでエアーコンプレッサーのないご家庭やオフィス、教室などでエア機器を使用することができます。
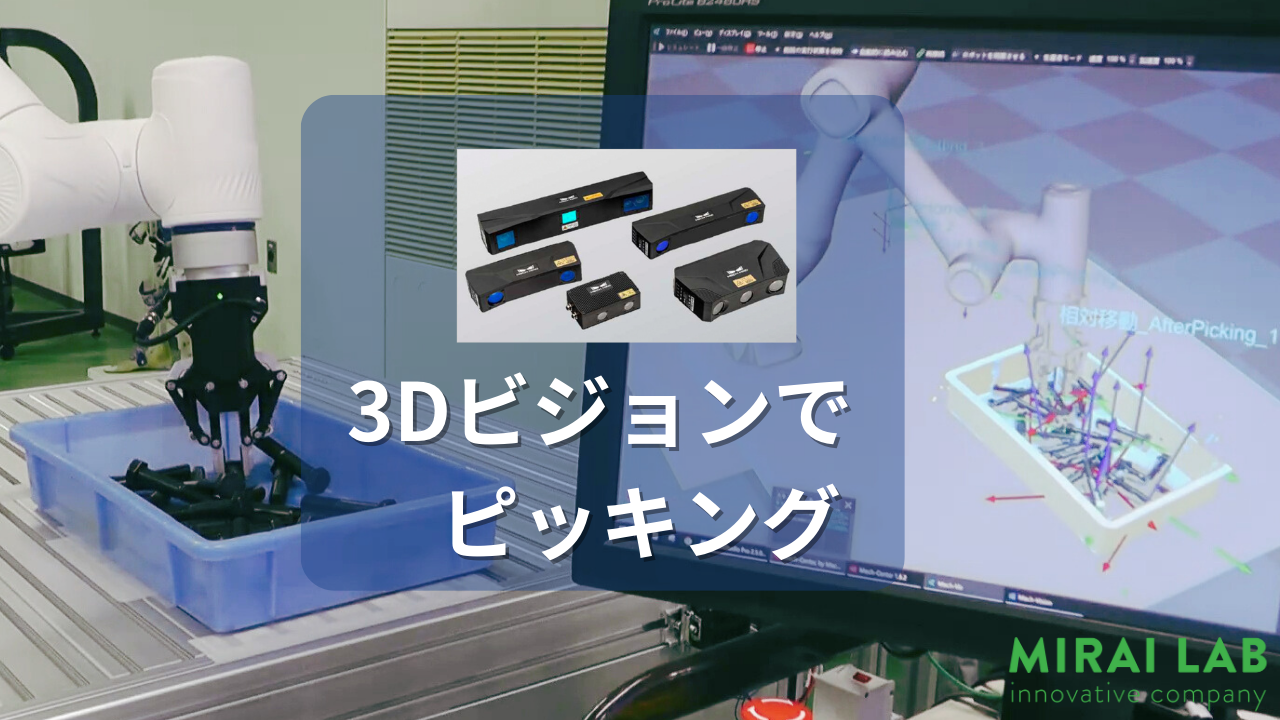
ビジョンカメラはロボットにとって目の役割を果たします。カメラを使用することで精密な位置決めをしなくても対象を認識して動作を補正することができます。ロボットはビジョン補正によってバラ済みされたものを掴みに行ったり、コンベアに流れてくる製品を取りに行ったりできます。
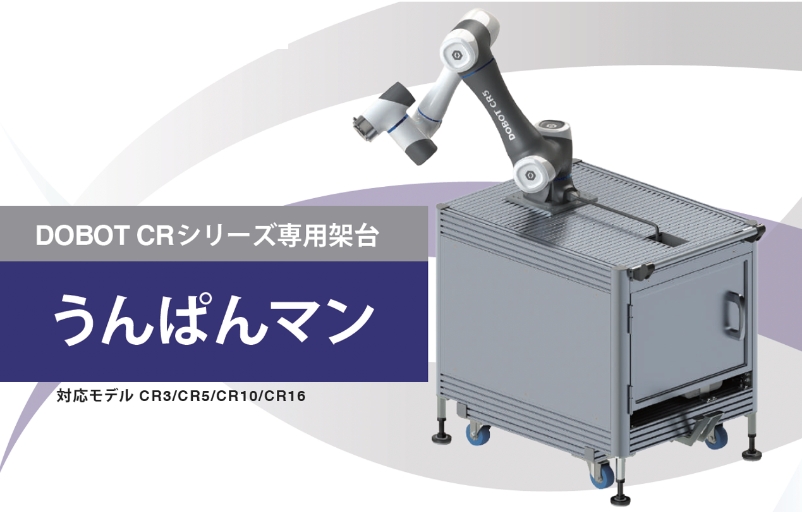
協働ロボットは安全柵で人と隔離する必要が無いため比較的簡単に設置できるのが特徴です。そのため移動式の架台を使用することで作業レイアウトを柔軟に変更することが可能です。
協働ロボットと組み合わせて使われる機工や別の装置はパッケージ品としてセット販売されることがあります。ここではDOBOTのパッケージ品について紹介します。
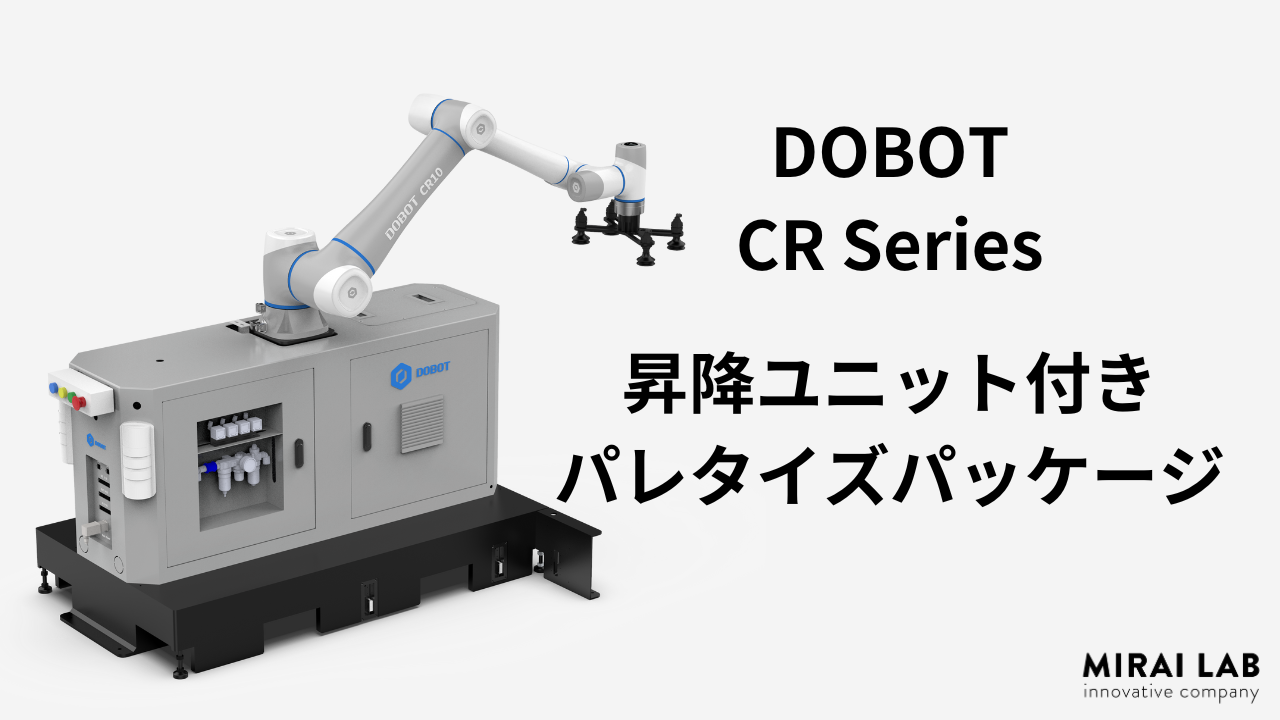
製品をパレット上に整列して積み上げられた状態のことをパレタイズと呼び、パレタイズ作業はしばしばロボットによって自動化される対象となっています。

AMRとは自律走行搬送ロボットのことでマップデータやセンサの情報を頼りに床を移動することができます。協働ロボットをAMRに乗せて使うことで複数の場所へロボットが移動して作業できるようになります。
我々アスカグループは周辺機器の検討を含めて相談いただけるサポート体制を整えた代理店として営業をしております。
最適条件の検討や導入後の問い合わせ等をトータルサポートできますのでご購入を検討の際は是非MIRAI-LABへご相談ください。

